Download
Abstract
Control theory seeks to design inputs that drive systems toward desired outputs, but practical control often relies only on data rather than known dynamics. This report explores a signature-based method for system identification that enables interpretable and expressive modeling of nonlinear dynamical systems. Unlike black-box neural networks, the model provides transparent feature trajectories, admits a closed-form nonlinear transformation, and is general enough to represent any dynamical system. We demonstrate its effectiveness on examples such as the Duffing oscillator, compare it to alternative approaches like state-space models and reservoir computing, and provide open-source implementations for reproducibility and future research.
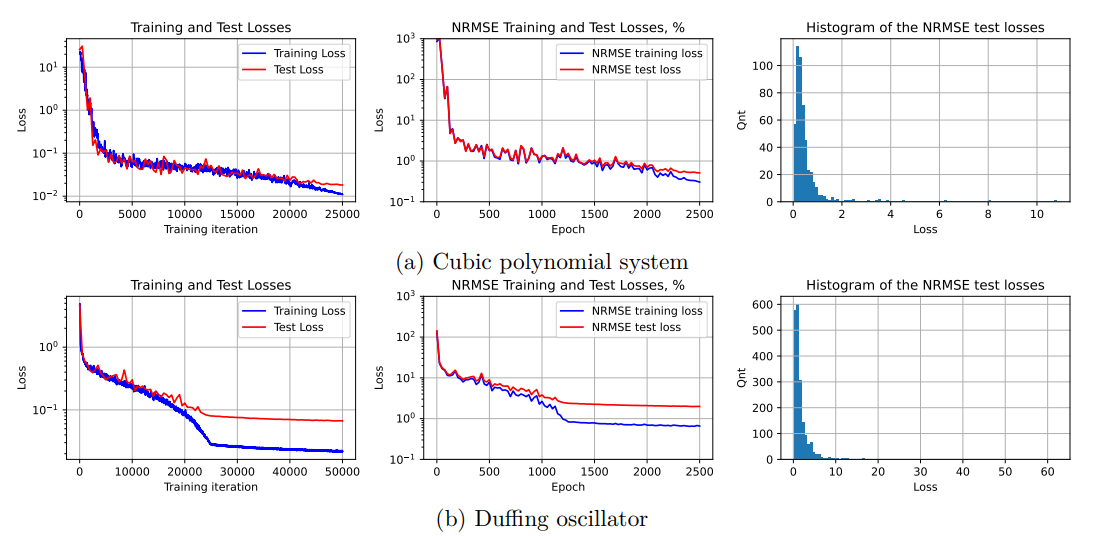
Figure 3: Summary of training the neural networks
Citation
Snytko V., Stepaniants G. 2025. “A Signature-Based Approach to System Identification and Prediction of Controlled Dynamical Systems” https://vladsnytko.com/papers/signature-based-modeling/Signature_Modeling.pdf.
@article{snytko2025signature,
author = {Vladislav Snytko, George Stepaniants},
year = {2025},
title ={A Signature-Based Approach to System Identification and Prediction of Controlled Dynamical Systems},
url = {https://vladsnytko.com/papers/signature-based-modeling/Signature_Modeling.pdf}}